Procedural animation research
Unity3D -- C#
▚ Project summary:
During this research, I spent more time on understanding procedural animations inside unity.
Full research document: Link
In our group we had some issues where making custom animation would not be a option, besides that in the custom C++ engine we are going to use, custom animations were not prioritized to work.
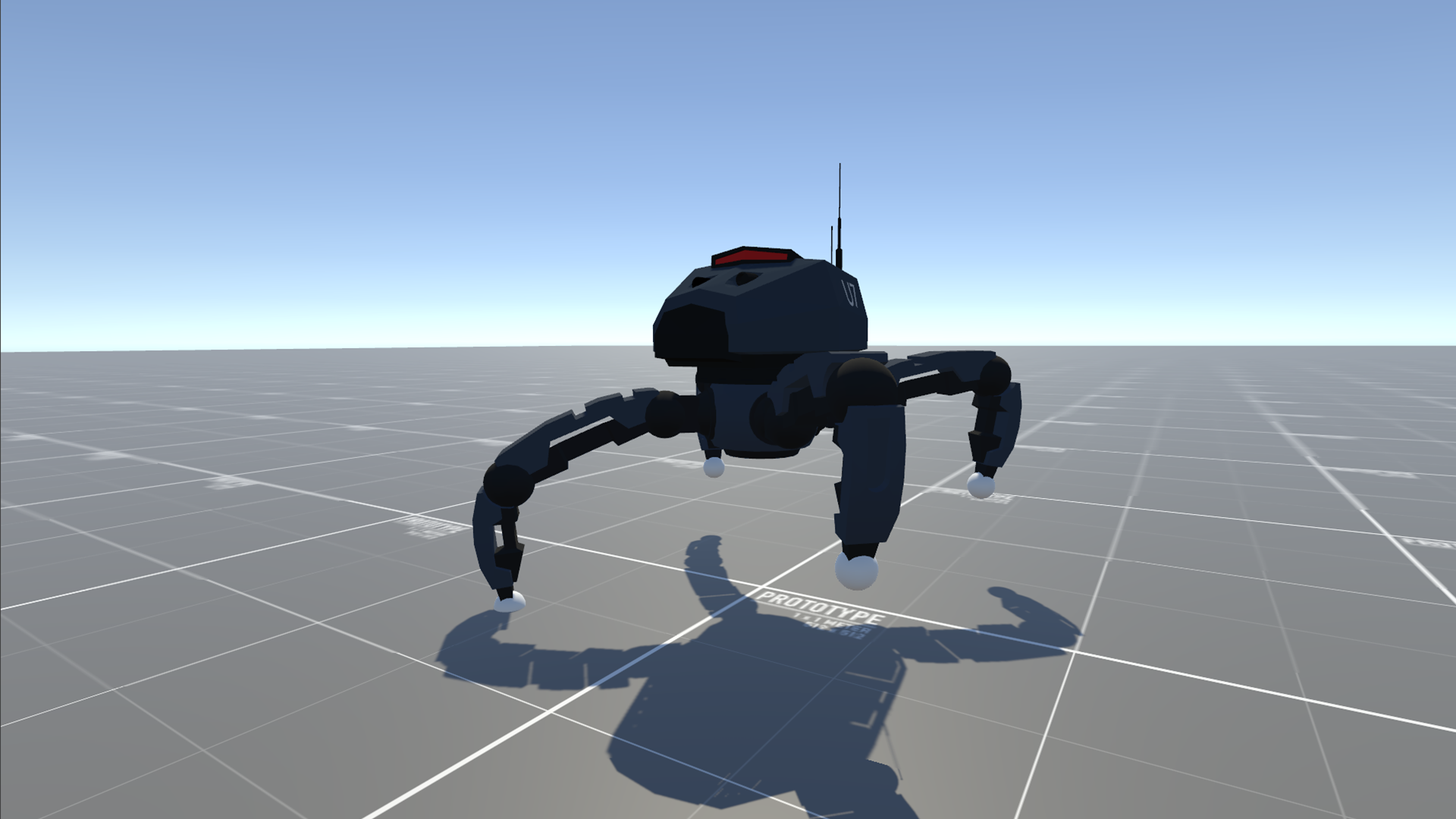
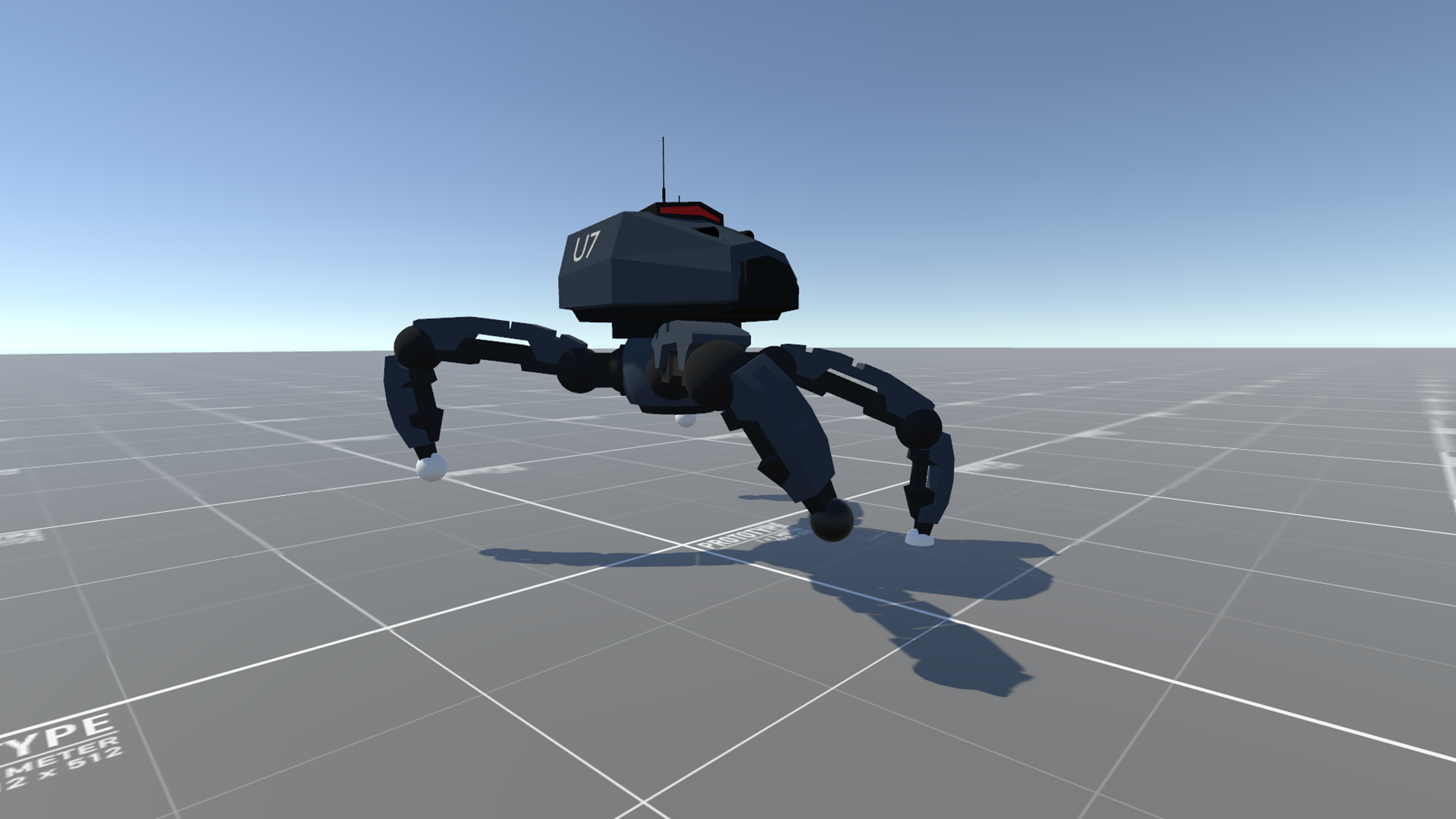
I came up with a possible solution, where procedural animations, are an excellent replacement of (our targeted style) robot leg animations.
This page is meant to show my research and conclusions.
The video below, is a video I used as a reference, and also showed my team the video to explain what the finished animations would look like.
this video was made by Justin Cerilli
▌Specifications:
Researched done: January 2021
Project type: School Research
Platform: PC, Windows
Time spent on research: 2 days
Engine and Tools: Unity - C#
▌My contributions:
○ Researching procedural animations in Unity
○ Researching movement using procedural animations, and additional applied translations to the object besides the legs
○ Documenting my research and conclusions
▌Project goals:
○ Learn more about procedural animations and its possible usages inside our intended project.
○ Learn what it takes to make a fully moveable, nice looking object using procedural animations as core animation replacement
○ Document the research