A* path smoothing
Custom engine -- C++
▚ Project summary:
In this Prototype, I implemented custom path smoothing to make the generated path more usable in our prototype tower defense game.
I worked on 2 different version of path smoothing, to make the A* more usable in our game.
Page contents:
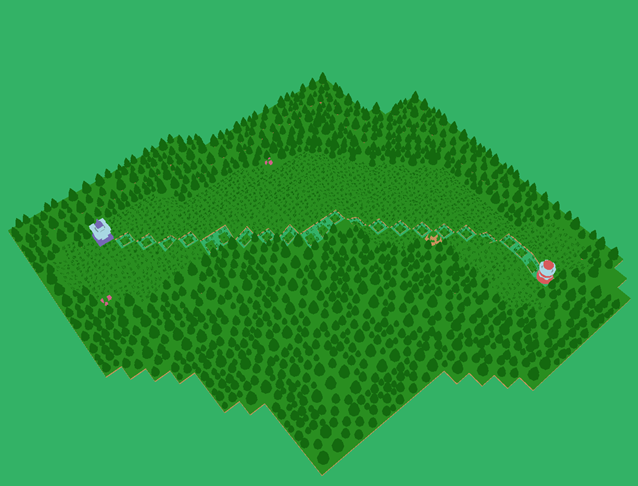
·A* with basic checkpoints smoothing
·A* with basic checkpoints results
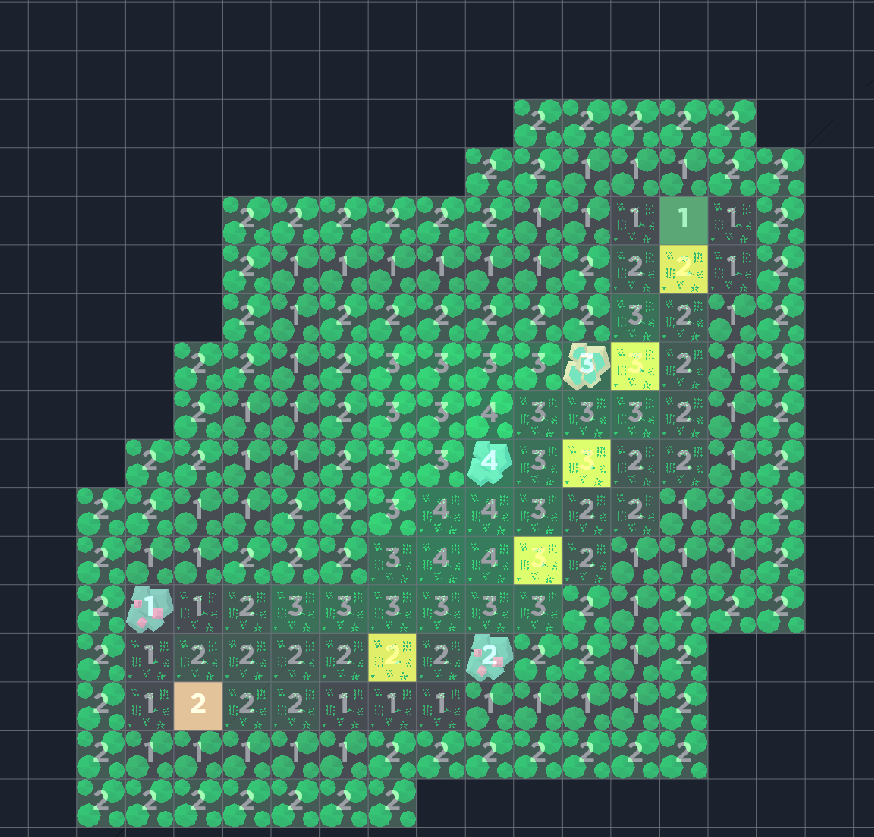
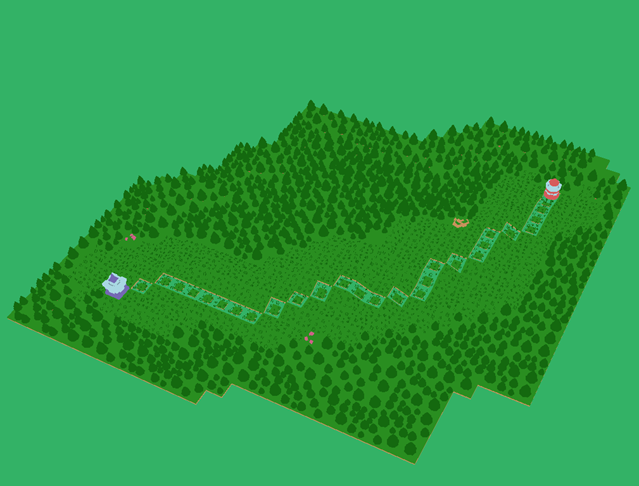
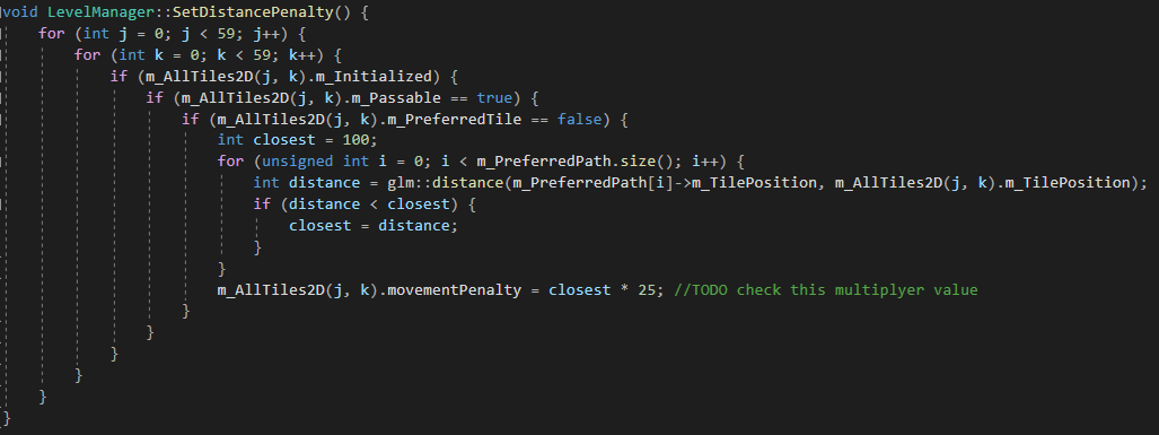
·A* with weights
·A* with weights results
▌Specifications:
Project type: Buas school project
Released: november-2020
Platform: PC,Windows
Time spent on project: 1 month (on the A*)
Engine and Tools: Custom engine - C++
▌My contributions:
○ Implemented A*
○ Implemented A* path smoothing using desired checkpoints
○ Implemented A* with weight smoothing
▌Project goals:
○ Understand A*
○ Understand different path smoothing/ A* result smoothing techniques.
○ Apply this to our project, to make the gameplay more fun